|
FRUND |
 |
|
| [ < back ] | ||
|
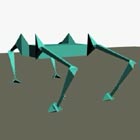
One of the FRUND possibilities – syntheses control movement multibody systems arbitrary structure by inverse method. The method is permitted to find program movement, drive forces and control movement. The control movement is determine by program drive forces and displacements and velocities error feedback. Schematized walk machine with two finger boot.
Animation trace program movements -acceleration and constant velocity movement.
Animation trace program movements -acceleration and constant roll velocity movement.
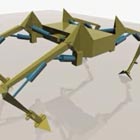
Schematized two finger boot with add masses for determine program drive forces.
Vertical boot displacement for difference control rules.
Program movement - а and control movement - б walking machine.
Program movement - а and control movement - б walking machine.
The movement of walking machine at static unstable regime, а - program movement, б - control movement without stabilization, в - control movement with correction program movement, г - control movement with correction program movement accord bottom reactions. |
||
| [ < back ] | ||
|
Volgograd State
Technical University © 2005, frund.vstu@gmail.com
|
||