О ФРУНД
ФРУНД - программная система формирования решений уравнений нелинейной динамики. Предназначена для моделирования динамики систем твёрдых и упругих тел. Основные черты методов представления уравнений движения, применяемых в системе ФРУНД: возможность унификации задания расчетной схемы исследуемого объекта с помощью конечного множества типов составляющих элементов, простота автоматического формирования уравнений движения и программ для их интегрирования, гибкость при добавлении в систему новых видов специальных взаимодействий.
Решаемые задачи
Для систем твердых и упругих тел мы решаем различные типы задач, основные из которых перечислены ниже.
Задачи кинематики и динамики
Расчёт различных режимов движения легковых и грузовых автомобилей
Задачи теплопереноса
Нагрев различных элементов составных конструкций
Задачи упругости
Упругие колебания тел, напряженно-деформируемое состояние
Задачи управления
Управление подвеской автомобиля, управление роботами
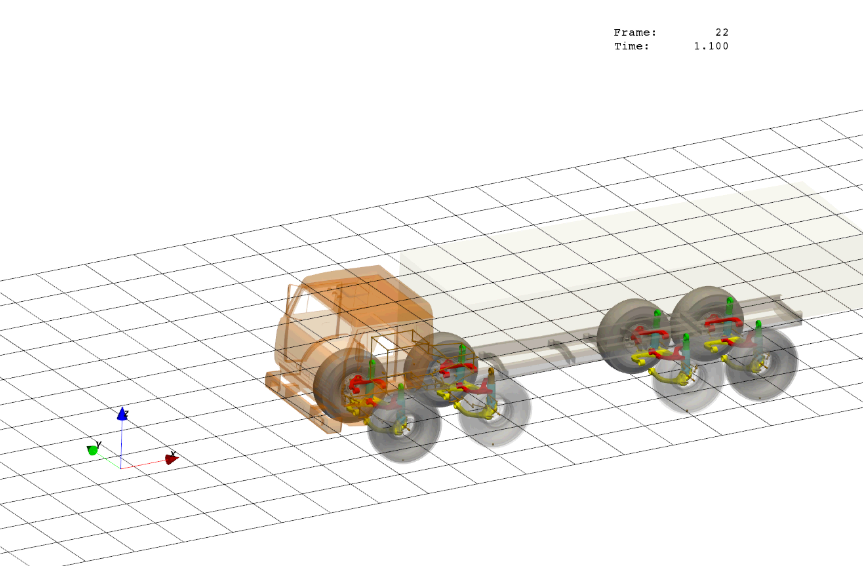
Анимация движения четырехосного грузового автомобиля
Скачать видео можно по ссылке (или по этой ссылке).
![model2[1]](http://frund.vstu.ru/wp-content/uploads/model21.png)
Исследование плавности хода автомобилей КамАЗ 6520, 4308 и 5460 (2010 г.)
Были проведены расчёты по исследованию плавности хода автомобилей. КамАЗ 6520: Модель автомобиля КамАЗ 6520: КамАЗ 5460: Модель автомобиля КамАЗ 5460: […]
![941606766_dUpZm-500x333[1]](http://frund.vstu.ru/wp-content/uploads/941606766_dUpZm-500x3331.jpg)
Комплексное исследование плавности хода автомобиля «Волк» (2008 — 2012 гг.)
Были проведены работы по исследованию плавности хода автомобиля Волк и разработке адаптивной системы демпфирования. Что было сделано: разработана математическая модель […]
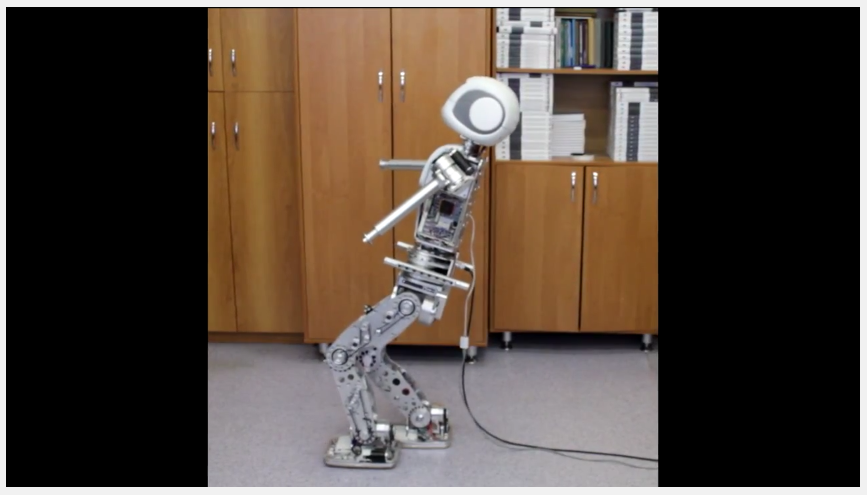

ВолгГТУ, робот-андроид AR-600 преодолевает ступень, 16 марта 2016
Вид сбоку: Вид спереди:

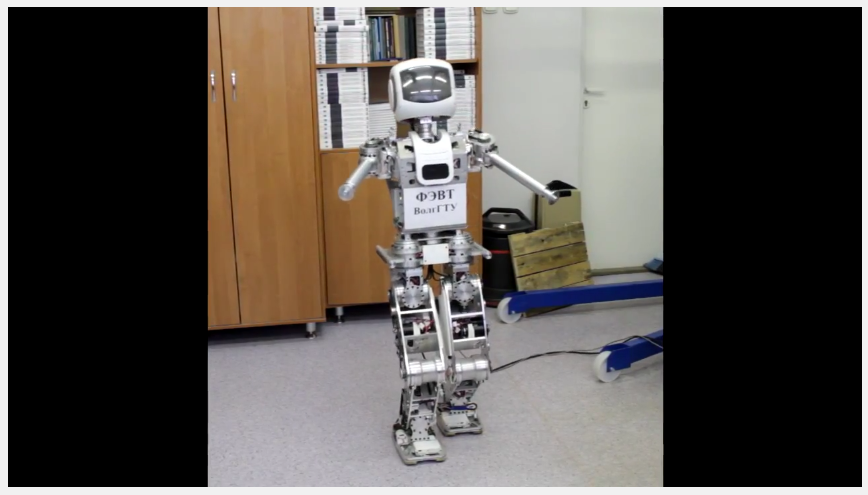
ВолгГТУ, шагание робота-андроида AR-600, 11 марта 2016
Вид сбоку: Общий вид:
Порядок оформления и подписания экспертного заключения для публикации
Для того, чтобы отправить куда-либо публикацию необходимо оформлять экспертное заключение о возможности опубликования. Все необходимые документы находятся на официальном сайте […]
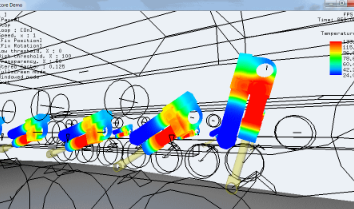
Результаты параллельного расчета многокатковой платформы
Модель динамики дополнена моделями теплопередачи в ГПР (28 расчетных модулей) Распараллеливание вычислений на кластере дает ускорение расчета в 12.5 раз […]
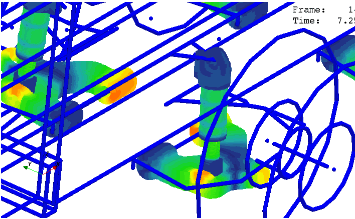
Результаты параллельного расчета модели грузовика с независимыми подвесками
Модель динамики дополнена моделями теплопередачи в ГПР (12 расчетных модулей) и моделями напряженно-деформированного состояния нижних рычагов (6 расчетных модулей). Распараллеливание […]
Свежие комментарии